| Home | JKIIT Archives | About the JKIIT | E-SUBMISSON |

Sorry.
You are not permitted to access the full text of articles.
If you have any questions about permissions,
please contact the Society.
죄송합니다.
회원님은 논문 이용 권한이 없습니다.
권한 관련 문의는 학회로 부탁 드립니다.
The Journal of Korean Institute of Information Technology -
Vol. 23 ,
No. 2



| [ Article ] | |
| The Journal of Korean Institute of Information Technology - Vol. 22, No. 12, pp. 75-83 | |
| Abbreviation: Journal of KIIT | |
| ISSN: 1598-8619 (Print) 2093-7571 (Online) | |
| Print publication date 31 Dec 2024 | |
| Received 13 Nov 2024 Revised 05 Dec 2024 Accepted 08 Dec 2024 | |
| DOI: https://doi.org/10.14801/jkiit.2024.22.12.75 | |
| 마이크로컨트롤러와 지능이론 기반 유도전동기 고장진단 | |
이종현*  ; 류민영**
; 오창욱**
; 이인수***
; 류민영**
; 오창욱**
; 이인수***
| |
| *㈜ 아진산업 기사 | |
| **㈜ 캐이와이 | |
| ***경북대학교 전자전기공학부 교수(교신저자) | |
Micro-Controller and Intelligent Theory based Fault Diagnosis of Induction Motors | |
Jong Hyun Lee*
; Min Young Ryu**
; Chang Wook Oh**
; In-Soo Lee***
| |
| Correspondence to : In-Soo Lee School of Electronic and Electrical Engineering, Kyungpook National University, 80 Daehakro, Bukgu, Daegu, 702-701, Korea Tel.: +82-53-950-7843, Email: insoolee@knu.ac.kr | |
 | |
Funding Information ▼ | |
초록
본 논문에서는 라즈베리파이 5와 지능이론(Intelligent theory)을 이용한 유도전동기 고장진단시스템을 제안하였다. 제안한 방법에서는 유도전동기 시뮬레이터를 통해 획득한 진동 데이터를 신경회로망 모델로 학습하였고 라즈베리파이 5를 사용하여 데이터 수집 및 진단 시스템 동작을 하나의 컨트롤러로 수행하였다. 또한 진단 결과를 터치스크린과 GUI(Graphical User Interface)를 통해 사용자가 직접 확인할 수 있다. 시스템의 성능은 유도전동기의 시뮬레이터에서 획득한 데이터를 사용하여 진단 실험 결과를 통해 시스템의 성능을 확인하였으며, CNN(Convolutional Neural Network), SVM(Support Vector Machine) 및 MNN(Multi-layer Neural Network)과의 고장진단 성능을 비교하였다.
AbstractIn this paper, we propose a fault diagnosis system for induction motors using Raspberry Pi 5 and intelligent theory. The proposed method involves learning a neural network model with vibration data obtained from an induction motor simulator. The Raspberry Pi 5 is utilized to acquire data and operate the diagnosis system as a single controller. Additionally, users can directly check the diagnosis results through a touchscreen and Graphical User Interface(GUI). The performance of the system is verified through fault diagnostic experiments using data obtained from the induction motor simulator and compared with the diagnosis results by Convolutional Neural Network(CNN), Support Vector Machine(SVM) and Multi-layer Neural Network(MNN).
| Keywords: fault diagnosis, induction motor, raspberry pi 5, vibration sensor, CNN, SVM, MNN |
|
Ⅰ. 서 론
유도전동기는 교류 전동기의 대표적인 예로, 브러시가 없는 브러시리스(Brushless) 형태로 직류전동기와 비슷한 출력 특성을 가지는 작동 형태를 가진다. 이에 따라 유도전동기는 구조가 간단하고 유지보수가 용이하여 현재 현대 산업 응용 분야에서 기계 및 산업 설비를 구동하는 가장 중요한 장비 중 하나이다. 그러나 유도전동기의 예기치 못한 고장은 생산 공장의 가동 중단을 초래하고, 상당한 경제적 손실을 유발할 수 있다. 따라서 유도전동기의 상태를 모니터링하고 고장을 조기에 감지할 수 있는 고장진단 시스템의 개발이 필요하다[1][2].
고장진단은 시스템 내에서 발생하는 고장을 탐지하고 이를 분류하는 과정으로, 크게 모델에 근거한 방법과 모델 근거하지 않는 방법으로 분류할 수 있다[3]. 모델에 근거한 방법은 시스템의 동작을 수학적으로 모델링한 모델을 근거로 하여 고장을 진단하지만, 시스템의 비선형성으로 인해 때문에 정확한 모델을 얻기가 쉽지 않다. 반면, 모델에 기반하지 않는 방법은 측정 데이터, 경험, 물리적 검토 등을 바탕으로 하며, 한계치 검사, 전문가 시스템 기법, 신경망(Neural network) 등의 방법이 포함된다. 특히 신경망은 병렬 처리 능력과 비선형함수 표현 능력, 학습 기능 등의 장점 덕분에 고장진단에 많이 활용되고 있다. 특히 이러한 방법은 기계 학습 알고리즘을 활용하여 모터 데이터의 복잡한 패턴을 분석하여 높은 정확도로 고장을 나타내는 미묘한 이상을 판단할 수 있다. 또한 신경망 기반 고장진단 기술은 대규모 모터 데이터 세트에 적합하여 모터를 지속해서 모니터링하고 향후 고장으로 이어질 수 있는 추세를 감지할 수 있다는 장점이 있다[3][4].
본 논문에서는 신호의 패턴인식에 강한 CNN 모델을 고장진단에 사용하였고, 유도 전동기 시스템에서 얻은 정상, 회전자 고장, 베어링 고장의 3가지 상태의 진동 신호를 사용하여 본 논문에서 사용한 CNN(Convolutional Neural Network) 모델의 고장 판단의 정확성을 검증하였다[5].
또한 라즈베리파이를 사용하여 고장진단 시스템을 구현하였다. 라즈베리파이를 통해 진동데이터의 수집과 CNN 모델을 이용한 고장진단을 컨트롤러 하나로 수행하였다. 그리고 터치스크린과 GUI(Graphical User Interface)를 통해 사용자에게 실시간으로 모니터링 할 수 있게 하였고 SVM(Support Vector Machine)과 MNN(Multilayer Neural Network)을 이용한 고장 분류결과와 비교하였다.
Ⅱ. 유도전동기 고장진단 실험환경
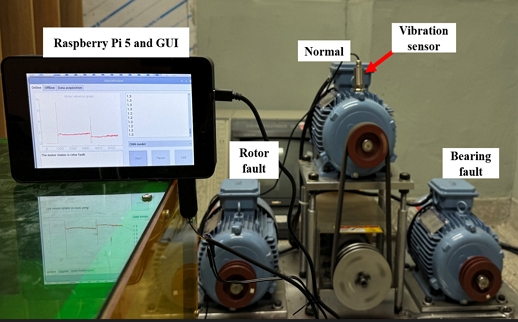
Fig. 1.
Induction motor experimental unit
유도전동기의 고장진단 실험을 위해 그림 1과 같이 정상, 회전자 고장, 베어링 고장을 유발시킨 3개의 3상 유도전동기로서 시뮬레이터를 구성하였다. 중앙에 위치한 유도전동기는 정상상태, 왼쪽과 오른쪽에 위치한 유도전동기는 각각 회전자 고장 상태와 베어링 고장 상태이다. 진동 데이터 수집을 위하여 전동센서는 Renke사의 RS-WZ1A-N01-1-CX을 사용하였고, 고장진단을 위한 마이크로컨트롤러는 라즈베리파이 제단의 Raspberry Pi 5를 사용하였다.
Fig. 1.
Induction motor experimental unit
유도전동기에서 발생하는 고장의 종류는 회전자 고장과 베어링 고장 두 가지를 고려하였다. 고장진단 실험을 위해 회전자 고장은 유도전동기의 회전자 봉에 드릴로 구멍을 내어 고장을 발생시켰으며, 베어링 고장의 경우는 베어링에 쇳가루를 넣어 베어링의 마모를 발생시켰다.
Ⅲ. 제안한 마이크로컨트롤러와 지능이론 기반 유도전동기 고장진단 알고리즘
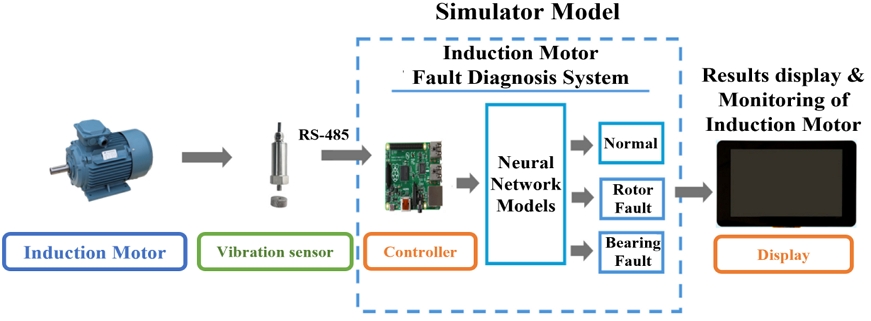
Fig. 2.
Structure of the induction motor fault diagnosis system
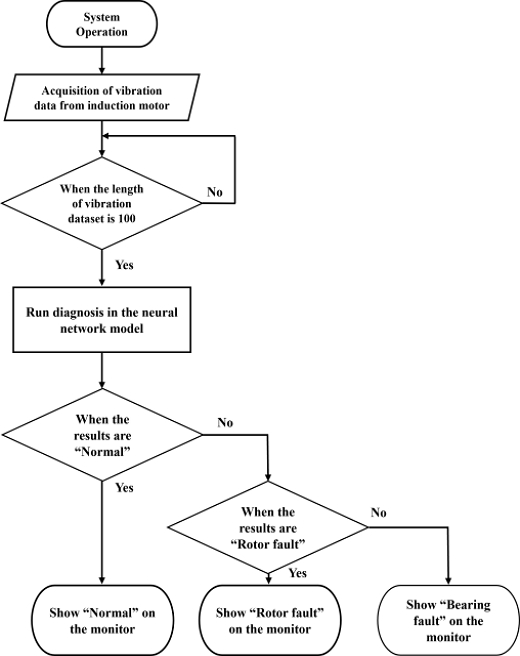
Fig. 3.
Flowchart of fault diagnosis algorithm
본 논문에서는 그림 2와 같이 마이크로컨트롤러와 지능이론을 이용한 유도전동기의 고장진단 알고리듬을 제안하였다.
Fig. 2.
Structure of the induction motor fault diagnosis system
고장진단을 위해 사용한 지능이론은 합성곱 신경망(CNN), 서포트 벡터 머신(SVM)과 다층 신경망(MNN)이며 각 각의 고장진단 성능을 분석하였다. 제안한 진단알고리듬에서는 유도전동기에서 진동 센서를 사용하여 진동 데이터를 획득한 후 컨트롤러에 데이터를 전달하며 컨트롤러에서는 신경망 모델을 통해 고장을 진단한다. 그리고 고장진단 알고리즘의 순서도는 그림 3과 같다.
Fig. 3.
Flowchart of fault diagnosis algorithm
3.1 합성곱 신경망(CNN)
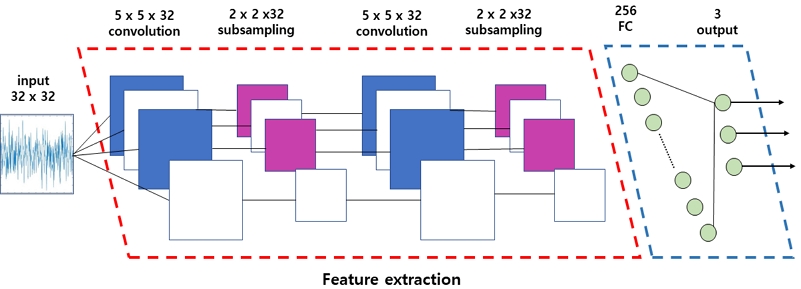
Fig. 4.
Structure of the CNN model
합성곱 신경망(CNN)은 기존의 패턴 인식 방식에서 분리되어 있던 특징 추출과 분류가 통합한 모델이다[5]-[7]. 합성곱 신경망은 기본적으로 다수의 합성곱 층(Convolutional layer)과 서브 샘플링층(Subsampling layer)으로 구성되어 있다. 유도전동기 고장시스템에 사용된 합성곱 신경망 모델의 구조는 그림 4와 같이 입력 층과 합성곱 층 2개, 서브 샘플링 층 2개 그리고 완전 연결 계층과 출력 층으로 이루어져 있다.
Fig. 4.
Structure of the CNN model
3.2 서포트 벡터 머신(SVM)
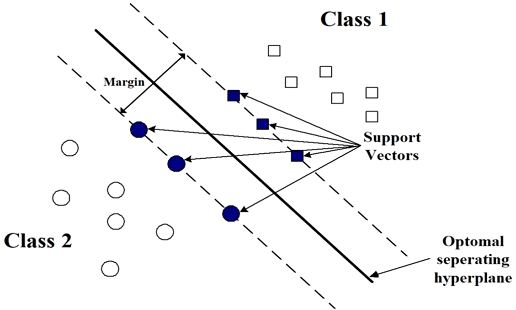
Fig. 5.
Separation of two classes by SVM
서포트 벡터 머신(SVM)은 블라디미르 바프닉(Vladimir Vapnik)[8]에 의해 개발된 학습 알고리즘으로서 원래 이진분류기(Binary classifier)였다. 즉, 그림 5와 같이 특징공간에서 초평면(Hyperplane)과 가장 인접한 지지벡터(Support vectors)들과의 거리인 여유(Margin)를 최대로 하는 최대여유초평면(Maximum margin hyperplane)을 찾아서 이진분류를 수행한다[9]. 그러나 모든 내적(Inner product)을 비선형 커널함수(Kernel function)로 교체하므로써 최대여유초평면이 원래의 입력공간보다는 훨씬 더 큰 차원을 가지는 비선형 사상(Mapping) 특징공간에 적합하게 되었으며 이로 인해 비선형 분류가 가능한 분류기를 설계할 수 있다.
Fig. 5.
Separation of two classes by SVM
3.3 다층 신경망(MNN)
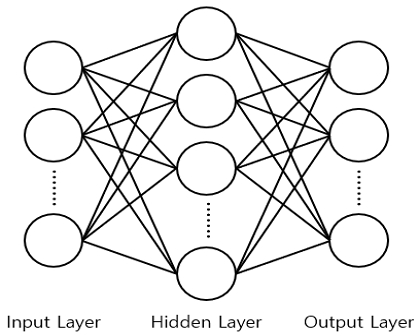
Fig. 6.
Architecture of Multilayer neural network
다층 신경망(MNN)은 선형함수만으로 구성되어 비선형 분류가 불가능한 단층 퍼셉트론의 한계를 보완한 신경망으로 구조는 그림 6과 같다[10][11]. 입력층과 출력층 사이에는 1개 이상의 은닉층이 존재하고 모든 계층의 노드들은 인접한 계층의 모든 뉴런과 서로 연결되어 있다.
Fig. 6.
Architecture of Multilayer neural network
다층신경망은 순전파와 역전파를 통해 학습을 수행한다. 순전파는 입력층에서 출력층 방향으로 가중치와 활성화 함수를 사용하여 출력값을 계산하는 방법이고 역전파는 순전파를 통해 계산된 신경망의 출력값과 실제값으로 손실함수의 값을 계산하고, 학습 알고리즘을 통해 손실함수의 기울기가 감소하는 방향으로 가중치를 갱신하는 방법이다.
3.4 그래픽 사용자 인터페이스(GUI)
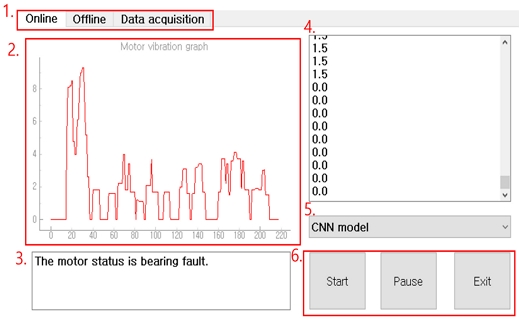
Fig. 7.
GUI for fault diagnosis
고장진단을 위해서 제작한 GUI는 그림 7과 같다. GUI에는 온라인 실시간 모드, 오프라인 모드 및 데이터 수집 모드와 같은 세 가지 동작 모드가 있다.
Fig. 7.
GUI for fault diagnosis
그림 6에서 각 창의 기능은 아래와 같다.
- 1번은 세가지 모드(실시간, 오프라인, 데이터 수집) 중 하나를 선택하는 탭이다.
- 2번은 현재 진동 데이터에서 획득되고 있는 진동 데이터를 실시간으로 보여주는 그래프 창이다.
- 3번은 고장진단 결과를 보여준다.
- 4번은 실시간으로 획득된 진동데이터의 값을 나타낸다.
- 5번은 CNN, SVM 및 MNN 모델 중 사용하고자 하는 고장진단모델을 선택할 수 있는 창이다.
- 6번은 프로그램 실행/정지/종료 버튼이다. “Start”버튼을 누르면 프로그램이 시작되고 “Pause”버튼을 누르면 프로그램이 일시정지된다. 그리고“Exit”버튼을 누르면 프로그램이 종료된다.
Ⅳ. 실험결과 및 고찰
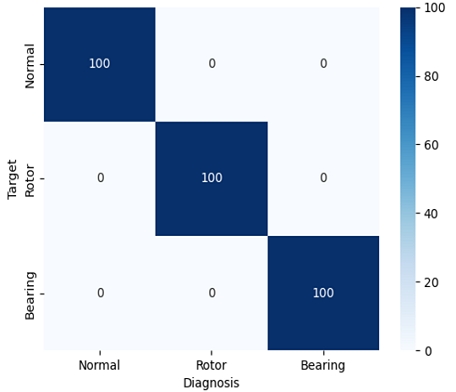
Fig. 8.
Fault diagnosis results by CNN
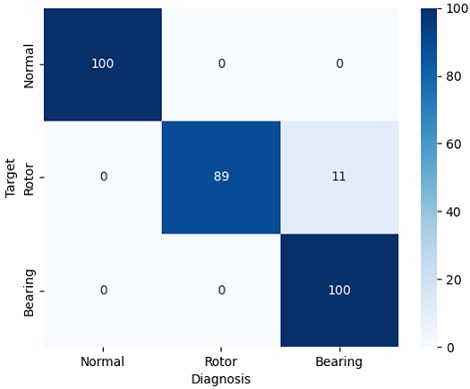
Fig. 9.
Fault diagnosis results by SVM
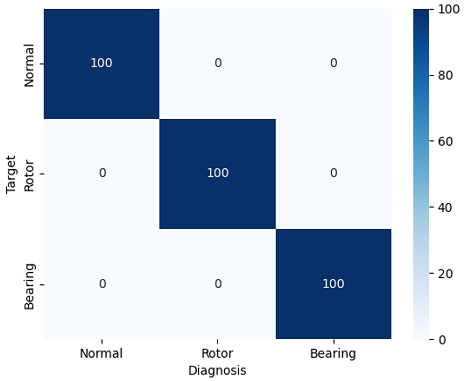
Fig. 10.
Fault diagnosis results by MNN
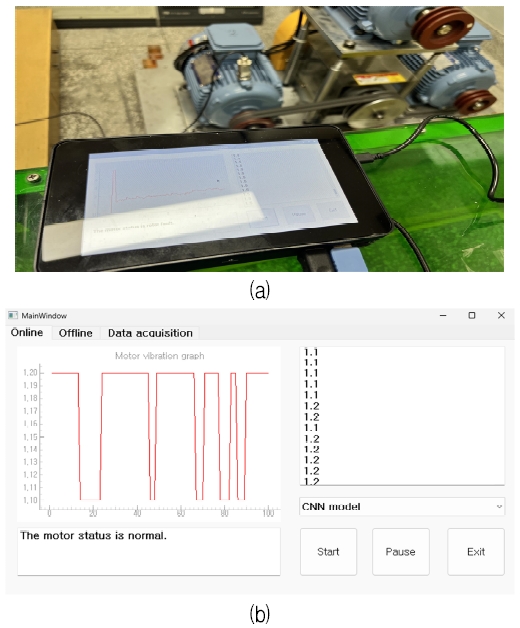
Fig. 11.
Induction motor fault diagnosis results (a) experiment (b) normal
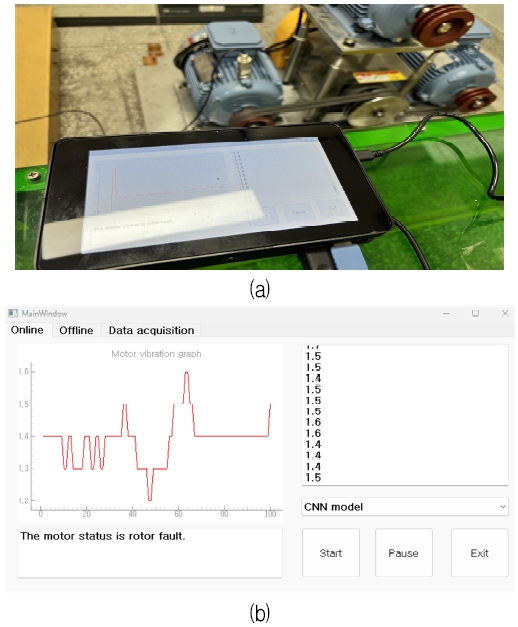
Fig. 12.
Induction motor fault diagnosis results (a) experiment (b) rotor fault
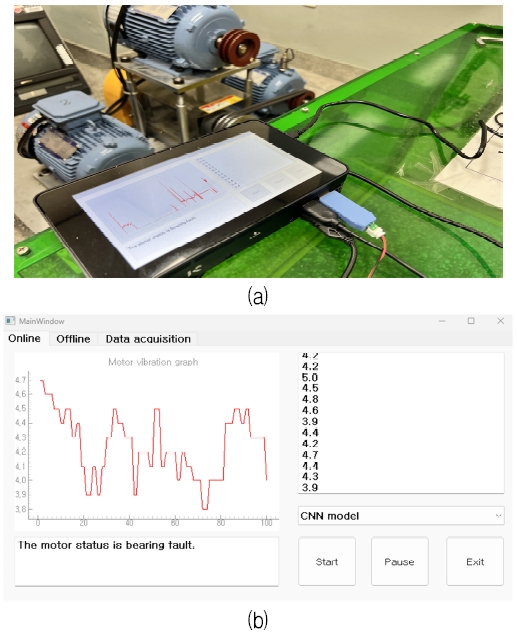
Fig. 13.
Induction motor fault diagnosis results (a) experiment (b) bearing fault
시스템 테스트를 위해 유도전동기 시뮬레이터를 사용하여 테스트를 진행하였다. 유도전동기 시뮬레이터는 각각 정상, 회전자 고장 그리고 베어링 고장상태의 유도전동기 3개로 구성되어 있으며 실험을 각 시뮬레이터에서 데이터를 얻고 이를 세 가지 모델 (CNM, SVM, MNN)을 통해 학습하였다.
시뮬레이터의 진동 데이터는 100개의 데이터를 한 쌍으로 정의하여 각 상태(정상, 회전자 고장, 베어링 고장)마다 70쌍의 데이터 세트를 학습으로 사용하여 총 210쌍의 데이터 세트를 사용하였고 100쌍의 데이터 세트를 테스트로 사용하여 총 300쌍의 테스트 데이터 세트를 사용하여 모델의 성능을 테스트하였다.
실험에 사용된 CNN은 100개의 노드를 가진 입력층과 첫 번째 합성곱 층(32개 노드) 과 두 번째 합성곱 층(32개 노드), 16개의 노드를 완전 연결 계층, 3개의 노드를 가진 출력층으로 구성된다. 두 개의 합성곱 층과 완전 연결 계층은 활성화 함수인 ReLU가 사용되었다.
그림 8은 CNN 모델에서의 유도전동기 시뮬레이터의 고장진단 결과를 혼동 행렬(Confusion matrix)로 나타낸 것이다. 혼동 행렬의 y축은 실제 클래스인스턴스를 나타내며 실제 유도전동기 상태를 의미한다. x축은 진단 된 클래스의 인스턴스를 나타내며CNN 모델이 진단한 유도전동기의 상태를 의미한다.
Fig. 8.
Fault diagnosis results by CNN
혼동 행렬에 나타난 CNN 모델의 진단 결과에서 각 상태에서 진단 결과와 실제 상태가 동일함을 확인할 수 있고 이는 모든 상태에서 100쌍의 데이터를 전부 알맞게 진단한 것을 확인할 수 있다. 따라서 CNN 모델의 진단 정확도가 100%임을 확인할 수 있다.
그림 9는 SVM 모델에서의 유도전동기 시뮬레이터의 고장진단 결과를 혼돈 행렬로 나타낸 것이다. 고장진단에 사용된 SVM 모델은 C 값을 1로 γ 값을 0.01로 설정하였고 RBF 커널을 사용하였다. SVM 모델은 정상과 베어링 고장상태에서는 100쌍의 데이터를 전부 정확하게 분류하여 100%의 진단 정확도를 보였으나, 회전자 고장 부분에서 회전자 고장으로 89쌍, 베어링 고장으로 11쌍으로 진단하여 89%의 정확도를 나타내었다. 이는 추후 파라미터 튜닝을 통해 성능 향상을 기대할 수 있다.
Fig. 9.
Fault diagnosis results by SVM
그림 10은 MNN 모델에서의 유도전동기 시뮬레이터의 고장진단 결과를 혼동 행렬로 나타낸 것이다. MNN은 100개의 노드로 구성된 1개의 입력층, 3개의 노드로 구성된 1개의 출력층, 2개의 은닉층으로 구성되었다. 첫 번째 은닉층의 노드 수는 32개, 두 번째 은닉층의 노드 수는 16개를 사용하였고, 은닉층의 활성화 함수로 ReLU 함수를 사용하였다. 학습 알고리즘은 아담을 사용하였고, 에포크 수는 3,000으로 하였다. MNN 모델은 CNN 모델과 동일하게 모든 상태에서 100쌍의 데이터를 정확하게 진단하여 100%의 정확도를 보여주었다.
Fig. 10.
Fault diagnosis results by MNN
고장진단 결과 SVM 모델을 제외한 CNN 모델 과 MNN 모델의 정확도가 100%로 둘 다 우수한 정확도를 보여주었다. 그러나 실제 시스템의 고장진단문제에 적용 시에는 데이터 수집 상황에서 노이즈가 발생하는 경우 등을 고려한다면 패턴인식 성능이 뛰어난 CNN 모델을 이용하는 것이 고장진단의 정확도를 높일 수 있을것으로 기대한다.
그림 11(a)와 (b), 그림 12(a)와 (b) 및 그림 13(a)과 (b)는 각각 정상상태, 회전자 고장상태 및 베어링 고장상태의 데이터로 학습한 모델을 탑재한 시스템을 사용하여 시뮬레이터의 모터 상태를 실시간으로 진단하기 위한 실험 모습과 고장진단 결과이다. 테스트는 CNN 모델을 사용하여 진행하였다. 시스템 테스트 결과 정상, 회전자 고장 그리고 베어링 고장상태를 정확하게 진단하는 것을 확인할 수 있다.
Fig. 11.
Induction motor fault diagnosis results (a) experiment (b) normal
Fig. 12.
Induction motor fault diagnosis results (a) experiment (b) rotor fault
Fig. 13.
Induction motor fault diagnosis results (a) experiment (b) bearing fault
유도전동기 고장진단 시스템의 동작 사이클은 데이터 수집시간과 고장진단 모델 실행시간 및 고장진단 결과의 출력시간을 합한 시간으로써 라즈베리파이 5와 젯슨나노를 마이크로컨트롤러로 사용했을때의 한 사이클의 동작 속도를 비교하였다. 먼저, 데이터 획득은 1초에 약 20개의 데이터를 획득하며 입력에 필요한 데이터는 100개이므로 데이터 획득에는 약 5초의 시간이 소요된다. 이후 각 컨트롤러에 대한 고장진단 모델 실행 속도를 구해보면 젯슨 나노의 프로그램 실행시간은 첫 사이클 실행시간은 약 174ms였다. 이에 반해서 라즈베리파이 5의 프로그램 실행시간은 평균 약 74ms의 실행시간을 보여준다.
이 결과를 통해 젯슨나노 보다 라즈베리파이 5를 이용하는 경우가 데이터획득부터 고장진단의 분류까지 총 고장진단 수행 시간이 약 0.1초 정도 빠르다는 것을 알 수 있었다.
Ⅴ. 결 론
본 논문에서는 라즈베리파이 5와 지능이론을 이용한 유도전동기 고장진단을 수행하였다. 실험을 위해 정상상태, 회전자 고장상태, 베어링 고장상태 유도전동기가 있는 유도전동기 시뮬레이터를 제작하였다. 시뮬레이터를 통해 진동 데이터를 수집하였고 CNN, SVM 및 MNN을 사용하여 고장진단을 수행하였고 성능을 비교하였으며, SVM 모델을 제외한 CNN 모델과 MNN 모델의 정확도가 100%로서 우수한 정확도를 보여주었다. 그러나 실제 유도전동기를 이용한 제어시스템의 고장진단문제에 적용 시 노이즈가 존재하는 환경적인 문제를 고려한다면 패턴인식의 성능이 뛰어난 CNN 모델을 이용하는 것이 고장진단의 정확도 면에서 도움이 될 수 있을것으로 기대한다. 또한 터치스크린과 GUI를 통해 사용자에게 실시간으로 모니터링 할 수 있도록 기능을 구현하였다. 실험결과 제안한 고장진단시스템이 정확하게 정상, 회전자 고장 및 베어링 고장을 잘 분류함을 알 수 있었다.
그리고 유도전동기 고장진단 시스템의 고장진단을 위해서 라즈베리파이 5와 젯슨나노를 마이크로컨트롤러로 사용했을 때의 한 사이클의 동작 속도를 비교하였으며, 젯슨나노 보다 라즈베리파이 5를 이용하는 경우가 데이터획득부터 고장진단의 분류까지 총 고장진단 수행 시간이 약 0.1초 정도 빠르다는 것을 알 수 있었다.
Acknowledgments
본 논문은 2024년도 과학기술정보통신부의 재원으로 연구개발특구진흥재단의 지원을 받아 수행된 연구임(2024-DG-RD-0018)
References
| 1. | W. Sun, R. Zhao, R. Yan, S. Shao, and X. Chen, "Convolutional discriminative feature learning for induction motor fault diagnosis", IEEE Transactions on Industrial Informatics, Vol. 13, No. 3, pp. 1350-1359, Jun. 2017. |
| 2. | I. S. Lee, "Fault Diagnosis of Induction Motors Using Discrete Wavelet Transform and Artificial Neural Network", Communications in Computer and Information Science, Vol. 173, pp. 510-514, Aug. 2011. |
| 3. | R. J. Patton, "Robust Model-Based Fault Diagnosis: The State of the ART", IFAC Proceedings Volumes, Vol. 27, No. 5, pp. 1-24, Jun. 1994. |
| 4. | D. Pasqualotto and M. Zigliotto, "Increasing feasibility of neural network-based early fault detection in induction motor drives", IEEE Journal of Emerging and Selected Topics in Power Electronics, Vol. 10, No. 2, pp. 2042-2051, Apr. 2021. |
| 5. | R. Zhao, R. Yan, Z. Chen, K. Mao, P. Wang, and R. X. Gao, "Deep learning and its applications to machine health monitoring", Mechanical Systems and Signal Processing, Vol. 115, pp. 213-237, Jan. 2019. |
| 6. | T. Ince, S. Kiranyaz, L. Eren, M. Askar and M. Gabbouj, "Real-time motor fault detection by 1-D convolutional neural networks", IEEE Transactions on Industrial Electronics, Vol. 63 No. 11, pp. 7067-7075, Nov. 2016. |
| 7. | Y. M. Hsueh, V. R. Ittangihal, W. B. Wu, H. C. Chang, and C. C. Kuo, "Fault diagnosis system for induction motors by CNN using empirical wavelet transform", Symmetry, Vol. 11, No. 10, pp. 1212, Sep. 2019. |
| 8. | R. K. Jha and P. D. Swami, "Fault diagnosis and severity analysis of rolling bearings using vibration image texture enhancement and multiclass support vector machines", Applied Acoustics, Vol. 182, pp. 23-45, Nov. 2021. |
| 9. | P. K. Kankar, S. C. Sharma, and S. P. Harsha, "Fault diagnosis of ball bearings using machine learning methods", Expert Systems with applications, Vol. 38, No. 3, pp. 1876-1886, Mar. 2011. |
| 10. | D. E. Rumelhart and J. L. McClelland, "Parallel distributed processing, volume 1: Explorations in the microstructure of cognition: Foundations", PDP Research Group, The MIT Press, 1986. |
| 11. | B. T. Pham, M. D. Nguyen, K.-T. T. Bui, I. Prakash, K. Chapi, and D. T. Bui, "A novel artificial intelligence approach based on multi-layer perceptron neural network and biogeography-based optimization for predicting coefficient of consolidation of soil", Vol. 173, pp. 302-311, Feb. 2019. |
저자소개
이 종 현 (Jong Hyun Lee)

2018년 2월 : 경북대학교 전자공학부(공학사)
2020년 2월 : 경북대학교 전자전기공학부(공학석사)
2024년 8월 : 경북대학교 전자전기공학부(공학박사)
2024년 9월 ~ 현재 : ㈜아진산업 기술연구소 전장선행개발팀 기사
관심분야 : 리튬 이온 배터리 SOC 및 SOH 추정, BLDC 모터제어
류 민 영 (Min Young Ryu)

1990년 2월 : 경북대학교 낙농학과(농학사)
2024년 2월 ~ 현재 : 경북대학교 융합기술경영학 석사과정
2015년 1월 ~ 현재 : ㈜캐이와이 fems 시스템 개발 서버구축관리 팀장
관심분야 : 산업용기계의 자동화, 공기압축기 관련 시스템
오 창 욱 (Chang Wook Oh)

1992년 8월 : 경북대학교 화학공학과(공학사)
1992년 6월 ~ 2003년 11월 : ㈜두산 품질보증팀장
2004년 1월 ~ 2023년 5월 : ㈜오씨티 대표이사
2024년 3월 ~ 현재 : ㈜케이와이 본부장
관심분야 : 산업용기계의 제어기구 및 스마트공장용 제어파트
이 인 수 (In-Soo Lee)
1986년 2월 : 경북대학교 전자공학부(공학사)
1989년 2월 : 경북대학교 전자공학부(공학석사)
1997년 2월 : 경북대학교 전자공학부(공학박사)
1997년 3월 ~ 2008년 2월 : 상주대학교 전자 및 전기공학 교수
2005년 8월 ~ 2007년 1월 : 미국 샌디에고 주립대학교 방문학자
2008년 3월 ~ 2014년 10월 : 경북대학교 전자전기공학부 교수
2014년 11월 ~ 현재 : 경북대학교 전자공학부 교수
관심분야 : 시스템 고장진단 및 고장허용제어, 배터리 SOC 및 SOH 추정, 신경회로망 기반 지능제어, 지능형 센서 시스템
 |
 |
Copyright 한국정보기술학회 All Right Reserved.
주소 : 대전시 서구 둔산로 133, 1713(둔산동,둔산현대아이텔)
Tel : 042-488-2015 / 042-483-8077 Fax : 070-4945-5005 kiitorkr@gmail.com
주소 : 대전시 서구 둔산로 133, 1713(둔산동,둔산현대아이텔)
Tel : 042-488-2015 / 042-483-8077 Fax : 070-4945-5005 kiitorkr@gmail.com